
Dans les journaux
Les étudiants de l’ESSAIM partent à l’assaut du petit écran en participant à l’émission E=M6 avec leur petit robot mis au point dans les labos de l’école.

Cinq robots mulhousiens dans l’arène sarthoise.
Pour la quatrieme année, le club E = M6 de 1 ‘Ecole supérieure des sciences appliquées pour 1 ‘ingénieur (ESSAIM) participe, dés ce mercredi, a la septième edition de la Coupe de France de robotique, dans le cadre du Festival international des arts et technologies (ARTEC), à la Ferté-Bernard dans la Sarthe
Jean-Baptiste Bonnet, responsable du club E=M6 de 1 ‘ESSAIM, cache, comme Cédric, Gwen, Edouard et la dizaine d ‘autres membres du club, sa fatigue derrière la satisfaction du travail bien fait.
“Depuis le début de 1 ‘année, on bosse presque toutes les nuits et pendant nos jours de libres” explique Jean-Baptiste, qui precise que malgré les nuits blanches, ces fondus de robotiques arrivent aux cours, le matin, avec le sourire. But de l ‘opération, construire 5 robots, dont un principal, qui participeront à la coupe de france de robotique, du 28 mai au 4 juin, dans laquelle sont engagées 150 équipes d ‘étudiants des grandes écoles d ‘ingenieurs et des universites, comme Centrale, Polytechnique ou 1 ‘Ecole nationale des Mines, voire le Massachusetts Institute of Technology, qui vit naitre, it y a vingt ans, le premier concours du genre. “L ‘an dernier, nous etions quart de finalistes et notre robot principal etait lent et fiable. Cette annee, it est plus rapide et plus fiable”
Cette competition high tech se deroule dans une arene, vu ont prix place les supporters survvltes, qui se dechainent durant les matchs. Des matchs qui ont lieu sur des tables de 3.4OmX2m aux parcours accidentes sur lesquels evoluent les robots, programmes pour faire eclater les ballons de baudruche de 1 ‘adversaire. « Une partie dure une minute trente. C ’est une attaque eclair. Mais it y a seulement 30 d 40 secondes d ‘action puisqu ‘il faut attendre que les robots atteignent les premiers ballonsLes robots sont entierement automanses et programmes. C ’est lui qui décide du parcours. Des qu ‘il demarre, on n ‘a plus aucun contact». Cette année, les étudiants mulhousiens ont pu utiliser du matériel haut de gamme dont des sonars à ultrason, pretes, en partie, par les laboratoires de I ‘Ecole et par les professeurs.
“Pour le reste, on s ’est debrouillé. On a fait des inventaires de magasins, ce qui nous à rapporté près de 10 000FF. Pour nous ces robots sont la vrtrine du savoir-faire des étudiants de l ‘ESSAIM et ils sont plus performants d ‘année en année” Pronostic des Mulhousiens: «On sera dans les 16 premiers!. C ’est tout le mal qu ‘on leur souhaite.
Daniel Carrot. Dernière Nouvelles d ‘Alsace 28 Mai 2000
Coupe de France E=M6 de Robotique Journal de l’ESSAIM
11.12.13 Mai à la Ferté Bernard 1999,
Coupe de France E=M6 de Robotique “Châteaux Forts”
Avec de gauche à droite et de haut en bas
Alain DAUBIGNE, Gwen SCHMITT, Gilles GUILLAUME, Jack  BERINGUIER, Emmanuel GILLON, Cédric WALTER, Edouard LABARRE, Jean Baptiste BONNET
L ‘Equipe ESSAIM 5ème sur plus de 180 équipes avec 1 gros robot (piloté par un 486sx sur carte mère PC104) + deux modules indépendants OBI 1 et OBI 2 (PIC 80C535).
L ‘ESSAIM et la 6ème coupe de France de robotique
C ’est le 12 mai à 3 heures du matin que nous sommes partis pour la 6e Coupe de France de Robotique à la Ferté-Bernard. Nous étions huit à aller à l ‘aventure.
A partir du mois d ‘octobre, une petite équipe s ’est formée pour participer à cette rencontre opposant écoles d ‘ingénieurs, IUT et autres facs. Après avoir mûrement réfléchi à une stratégie, nous avons enfin commencé la réalisation du robot principal porteur de deux petits modules au mois de mars! Soit, c ’est peut-être un peu tard et si l ‘école y participe à nouveau l ‘an prochain, il vaudrait mieux commencer un poil plus tôt. Ca devrait réduire le stress et diminuer le nombre de nuits à passer sur le robot Au moins, les modules, eux, étaient bien avancés. Du moins le croyait-on vu ce qui s ’est passé par la suite, mais n ‘anticipons pas.
Les vacances de Pâques (quelles vacances?) ont permis à ceux d ’entre nous qui sont restés à Mulhouse de poursuivre la réalisation du robot. En vérité, avant il n ‘y avait rien et après, un “truc qui bougeait”
La rentrée! A peine trois semaines avant le départ, plusieurs contrôles étaient prévus durant cette période et le robot était très loin d ‘être fini. C ’est bizarre comme le temps passe plus vite dans ces moments là. Bref, de route
Bref, de fébrilité autour du robot en plantage d ‘interros, nous arrivons à la veille du départ. Le robot qui avait dans l ‘intervalle mérité son nom, commençait à faire n ‘importe quoi à un endroit de la piste. Après vérification du programme et dans l ‘incapacité totale à trouver une quelconque erreur, d ‘un commun accord nous nous sommes accrochés à un “c ’est à cause de la piste” bien pratique et qui, au vu de son état déplorable, nous paraissait satisfaisant.
Comme malheur ne vient jamais seul,
Gwen, qui commençait à s ‘énerver à cause du réglage des capteurs à ultrasons des modules, grille le contrôleur de l ‘un des deux modules. Après des efforts désespérés pour le remettre en état de marche, il accède au titre de source de pièces détachées pour le module survivant. Mais comme nous le verrons plus tard, tel le phénix, il renaîtra de ses cendres et nous rendra bien service
Et voilà, enfin le départ! Un minibus et une voiture accompagnatrice sont nécessaires pour emmener les personnes et tout le matériel nécessaire. Neuf heures de route plus tard, nous voici enfin à destination. Après avoir réglé les détails administratifs, nous obtenons un box aux dimensions plus que réduites: à huit on ne pouvait y rentrer tous en même temps. Petit problème, il faut partager le box avec une autre équipe, en l ‘occurrence Supélec campus Rennes, et eux, ils sont dix-huit! A part ça l ‘ambiance était super bonne et sans aucune compétitivité entre nos deux équipes car leur robot n ‘était capable de réaliser que des shows sons et lumières! Il faut dire qu ‘ils étaient venu à la Ferté avec un robot en kit!!
Peu après nous être installés, nous avons commencé les essais en se demandant comment il allait réagir. Oh surprise, il fonctionnait correctement! Sans essayer d ‘améliorer ses performances, nous sommes donc allés directement aux homologations. A ce moment, les deux modules souffraient le martyre et ils ont été homologués sans bouger, mais le robot a réussi à faire tomber quelques tours dès son premier essai! Ouf! Le tir n ‘était pas précis du tout (les arbitres étaient ses cibles préférées!), le robot n ‘a pas réussi à faire tout le parcourt qui lui était assigné, mais il a réalisé le minimum requits.
De retour. au stand, joie et fébrilité, mais les modules s ‘obstinent à ne pas fonctionner, les capteurs de position du robot ont besoin d ‘être réglés, il faut réussir à gagner en précision sur les tirs..
A la fin de la période d ‘homologation, qui a été prolongée pour permettre aux équipes qui n ‘étaient pas encore prêtes d ’essayer de participer à cette Coupe, seules quatre-vingt robots sont encore en course sur les cent soixante présents (et cent quatre vingt inscrits!).
Premier match contre l ‘EFREI. Les deux modules ont pu être remis en état dans la nuit et participent à cette rencontre. Beaucoup de tension dans les deux camps car aucune équipe n ‘a pu faire de test sur les tables de rencontre. L ‘éclairage n ’est pas le même, la couleur de la piste est légèrement différente et notre robot utilise des capteurs infrarouges très sensibles à ces changements. On pose le robot sur la table, alimentation de l ‘électronique, chargement du programme, alimentation des moteurs, et attente du signal de l ‘arbitre pour tirer la ficelle qui donne l ‘ordre au robot de démarrer. 3, 2, 1, c ’est parti! Le robot adverse reste scotché à sa position de départ, alors que le notre se déplace correctement, ramasse deux balles et les tir à coté du château adverse! Heureusement, les quatre tirs suivant font mouches et le résultat du match est de onze tours tombées (sur quinze au total) à zéro. Première victoire du robot de l ‘ESSAIM! La meilleur performance de l ‘école venait d ‘être atteinte dès le premier match!
Ce match pourtant nous avait montré nos faiblesses: le tir était certes puissant, mais peu précis et surtout les deux modules se sont retrouvés au fond de la fosse car ils étaient dans l ‘incapacité de traverser les passerelles à cause de l ‘éclairage ambiant qui brouillait les infrarouges. Jusqu ‘à trois heures du matin, nous avons multiplié les tests pour résoudre ces problèmes. Le tir est devenu extrêmement précis grâce à quelque lignes de code supplémentaires et des tests
nous ont permis de déterminer les angles les plus destructeurs pour le château adverse. Soudain, le robot s ‘arrête. Ah? On cherche la panne. Rien de suspect. Les tensions sont correctes, les intensités aussi. On le redémarre, il tourne normalement. On continu nos essais et encore un arrêt non prévu. Branle bas de combat. Presque toute l ‘équipe était allée dormir et il ne restait que J.B., Alain et moi. On cherche d ‘où peut provenir la panne. Re-test, re tout correct, re???. Au petit matin, après une (autre) nuit blanche, on localise la panne: le régulateur de tension dans l ‘électronique, bien qu ‘étant à la moitié de ses capacités, chauffait et se mettait en sécurité. Ouf, on a de la rechange et Son remplacement ne pose pas de problème. Re test rideau.
Le deuxième match n ’est plus que dans quelques heures. On se met en chasse d ‘un régulateur plus puissant auprès des autres équipes. La délivrance vient de l ‘ENS Cachan qui nous en donne un deux fois plus puissant que ce qu ‘on avait. Enfin, ça marche. Mais comme quand on aime on ne compte pas et qu ‘une tuile en appelle une autre, une fumée s ‘échappe du robot. Après l ‘arrêt immédiat, on lui retire ses carters de protection. La panne est vite localisée: pendant un remplacement de batteries (et il y en a eu beaucoup!), un circuit imprimé à été malencontreusement plié et faisait contact avec la carcasse. Bref. court-circuit, deux régulateurs en rideaux, les circuits imprimés fondues et un seul régulateur de rechange: ça ne se présentait pas super pour la suite! Pour couronner le tout, le match devait avoir lieu dans moins d ‘une demi heure.
Remplacement des régulateurs, circuits refaits au fer à souder, on fini in extremis pour aller faire le match.
On place le robot sur l ‘aire de départ en croisant les doigts pour qu ‘il n ‘y ait pas de fumée lors de la mise
en route. Début du match. Le robot à l ‘air de se comporter correctement. Il ramasse une puis deux balles, se met en position de tir, tir et fait tomber cinq tours comme prévu lors des tests nocturnes. Il se remet en position pour le deuxième tir qui doit en faire tomber cinq de plus, tir.. oh! tir bon sang! Malheur, dans notre hâte nous n ‘avons pas donné assez de vitesse au rouleau ramasseur de balle et la deuxième ne s ’est pas engagée dans le système de tir.
On bloque le robot adverse (Torsac) qui a traversé la fosse et a commencer à détruire notre château, mais le mal est déjà fait et le match est perdu par neuf tours contre cinq.
L ‘après-midi, troisième match contre l ‘ISEP. Le robot est au point et un module fonctionne. Il a été reprogrammé pour parcourir entièrement la piste en partant dans la direction opposée au robot, traverser la fosse et semer la pagaille dans le camp adverse.
Le robot principal fonctionne parfaitement, le module adverse et le notre se rencontrent et se neutralisent mutuellement. Le robot de l ‘ISEP réussi à contrer plusieurs de nos tirs et ils gagnent par cinq tours contre deux, mais ce match, bien que perdu, a été l ‘une de nos plus belles rencontres.
Le même après-midi, on doit jouer notre quatrième match. On recherche notre prochain adversaire dès que l ‘on connaît son nom. Il s ‘agit de l ‘EIC. On envoie nos espions pour connaître leur stratégie: ils disposent de deux modules qui
utilisent les bords de la piste pour se déplacer! Nous n ‘avons pas encore été confrontés à ce problème et nous ne disposons que de vingt cinq minutes pour trouver une parade efficace. La seule solution est de bloquer les deux modules en se mettant sur leur trajectoire, mais il faut pour
cela reprogrammer à nouveau le robot et le module pour qu ‘ils s ‘arrêtent pile au bon endroit. On cogite, on s ‘agite, mais au bout du compte les deux robots sont reprogrammés et, pendant le match, nos adversaires n ‘ont pas eu l ‘air ravi de voir leurs deux modules se faire contrer des deux cotés à la fois. Résultat: trois tours contre dix pour nous.
Le lendemain matin, match contre Paris XI, finaliste l ‘an dernier. La nuit a permis à Gwen de programmer une nouvelle fois ses modules qui, miracle, fonctionnent à nouveau tous les deux. Maintenant, ils provoquent l ’effet “dominos”, c ’est-à-dire qu ‘ils se présentent par le coté du château pour que les tours tombées en entraînent d ‘autres.
Le match se déroule très bien pour nous, tous nos robots fonctionnent enfin parfaitement et on le remporte douze à cinq.
Nous finissons donc la phase qualificative en sixième position, certes avec deux défaites, mais en étant troisième au nombre de tours abattues.
Plus que satisfait d ‘être arrivés là, nous attendons l ‘après-midi et les phases finales en se laissant aller.
Certains en profitent pour dormir un peu. On prend enfin un repas digne de ce nom, et surtout chaud!
L ‘heure attendue arrive enfin et à notre grande surprise, on vient nous demander de prendre toutes les
affaires dont nous pourrions avoir besoin car nous ne pourrons plus revenir aux stands à cause du temps extrêmement limité entre chaque rencontre. A ce moment, il ne reste que seize équipes. Notre match de huitième de final est contre l ‘ESIM. Nous ne connaissons pas leur robot et surtout, on se demande comment le robot va réagir à la lumière du plateau télé. Après une interminable attente assez dure pour les nerfs, on entre en scène. Le match commence. Arrivé au premier virage, le robot principal devient fou et se perd. On croit alors que notre route s ‘arrête là, surtout que le robot en face s ’en donne à cœur joie.
Neuf à zéro: la raclée! Heureusement, le module qui est parti dans la direction opposée au robot a pu passer la fosse et faire domino! neuf partout! Le match nul a réussi à être arraché et la rencontre devra être rejouée. On profite de la pause accordée pour diminuer la sensibilité des capteurs, mais on doit le faire à l ‘aveuglette car on n ‘a pas accès à la piste et surtout à l ‘éclairage. Deuxième tentative.
On a changé de coté et les robots fonctionnent parfaitement. L ‘ESIM a reprogrammé son robot pour pulvériser les modules qui leur ont coûté la victoire au match précédent. Leur robot est rentré à pleine puissance dans l ‘un des modules, l ‘a renversé et lui est monté dessus, se bloquant par la même occasion. Pour ceux qui en douterait, on a eu la preuve qu ‘une copulation de robot ne donnait pas un robot, mais seulement des bouts de robot.
J ‘aimerais quand même bien comprendre pourquoi ils avaient une roue abrasive sous leur robot???
Heureusement, malgré une roue et un carter poncés le module n ‘a pas souffert de sa mésaventure et nous avons gagné douze à trois
Nous voici maintenant en quart de final contre l ‘ENI de Brest. Nos deux robots sont équivalents, mais nous avons en plus des modules qui font des malheurs chez l ‘adversaire! Le match commence et c ’est la catastrophe: exactement au même endroit que
précédemment, notre robot devient fou et se met même à abattre nos propres tours! Le module fait comme avant en descendant neuf tours, mais l ‘ENI en a fait tomber onze.
Un moment d ’espoir lorsque le module se dirige vers trois tours intactes et les fait basculer, mais malheureusement, elles se remettent en position verticale après avoir dangereusement oscillées. C ’en était fini de nos chances d ‘aller plus loin dans la compétition.
Le rangement du matériel fut très difficile, la fatigue non ressentie jusque là, nous gagne. Toute l ‘équipe s ’est couchée de bonne heure (dix heures) pourpouvoir prendre la route dans de bonnes conditions le lendemain matin.
Ouelques impressions des membres de mon équipe
recueillies après cette expédition robotique
Pour Alain, «c ’est quoi dormir? » et il en a « ras le c des régulateurs qui fument !».
J.B. est le plus radical : «plus jamais ça. enfin jusqu ‘à l ‘année prochaine et ce coup-ci se sera pour gagner! ».
Manu reconnaît avoir eu « peu d ‘heures de sommeil, mais une telle tension qu ‘on en oublie la fatigue».
Et je terminerai par ces quelques mots : « c ’est chouette de construire un robot, il faut toujours faire plus!»
E. Labarre (L ‘Echo de la Ruche I Numéro 36 Ml JUIN 1999)
Remercions l ‘Equipe au complet: J. B. Bonnet, J. Béringuer, G. Schmitt, E. Walter, A. Daubigné, M. Gillon et
G. Guillaume et surtout un grand merci à l ‘administration, aux professeursqui nous ont soutenu ainsi qu ‘aux techniciens sans qui nous aurions eu beaucoup de difficultés à réaliser le robot.
Le robot 1999 de l ESSAIM en images
Le Robot de l ‘ESSAIM (aujourd ‘hui appeleé ENSISA) lors de la coupe E=M6 de Robotique.
L’ESSAIM est créée par décret le 1er août 1990. L’Administrateur Provisoire de cette nouvelle Ecole est le Directeur de l’IRP : Monsieur Gérard METZGER.
L ‘ENSISA est une école d ‘ingénieurs publique qui résulte de la fusion de l ‘ENSITM (Ecole Nationale Supérieure des industries Textiles de Mulhouse) et de l ‘ESSAIM (école supérieure des sciences appliquées pour l ‘ingénieur de Mulhouse). Elle a été créée en juillet 2006 .










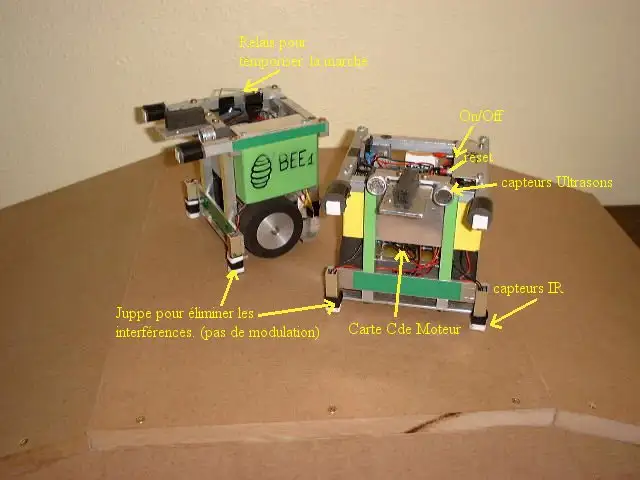



Notre robot
Voici Le robot ESSAIM ainsi que nos deux petits modules destructeurs OBee-1 et OBee-2
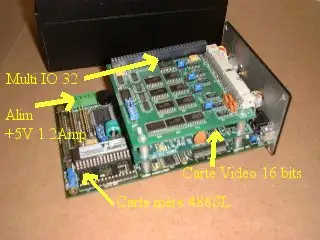
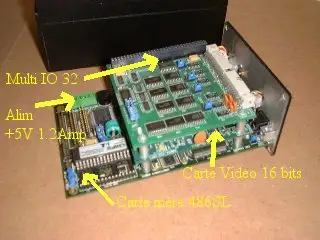
Notre Carte Mère : 1 Arcom Pc-104 avec carte Multi Io32 (32 E/S numériques) et une carte Vidéo (3 cartes en tout. C ’est un 486SL 25 MHz AMD avec 2 Mo de flash (programme) et un Rom Bios. Carte prêtée par le laboratoire LSI (Logiciels des Systèmes Industriels de l ‘ESSAIM). Cette Année, on a acheté un beau boitier Alu qui n ’existait pas l ‘année dernière.
Le programme en turbo pascal est ICI. Il se compile sur le robot et se déclenche dans l ‘autoexec.bat au boot du PC.
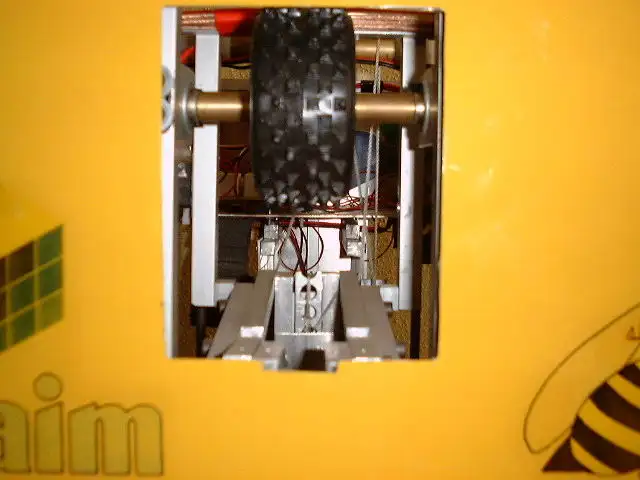
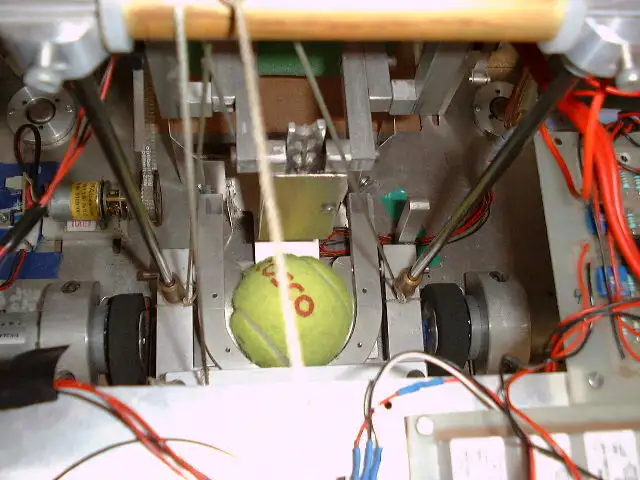
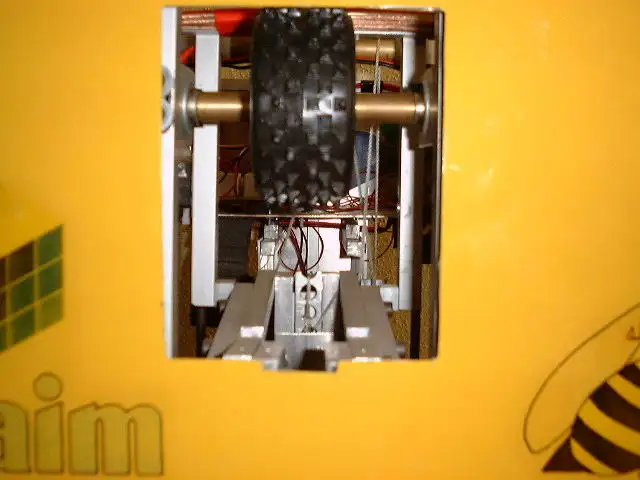
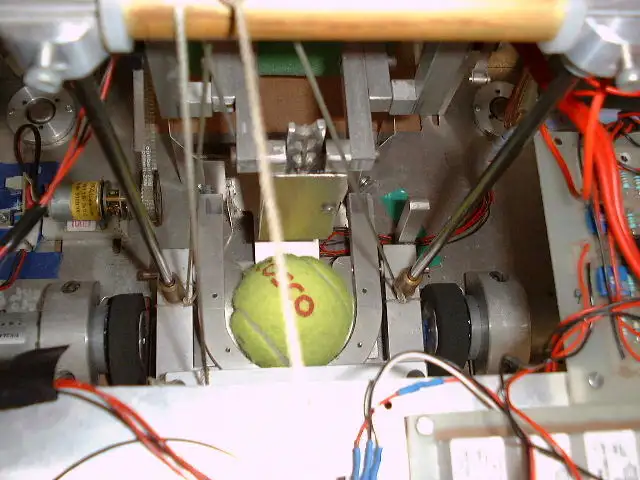
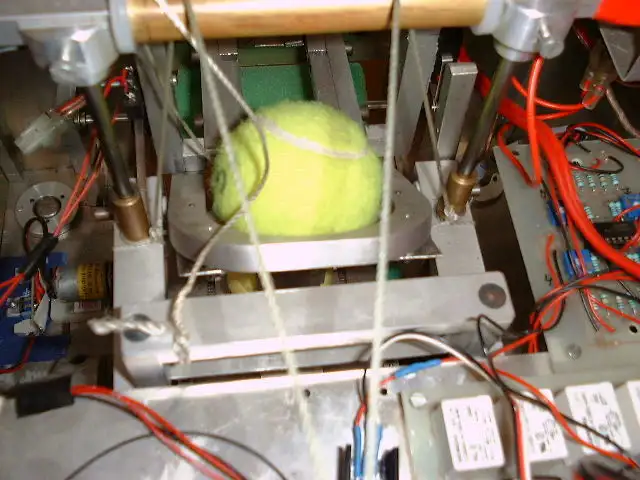
Vu de Face (cliquer pour élargir):

C ’est par ici, que les balles de tennis sont aspirées et rejetées violemment. Le rouleau est un tube de mousse de peinture. Le carénage est en tôle d ‘alu peint en jaune.
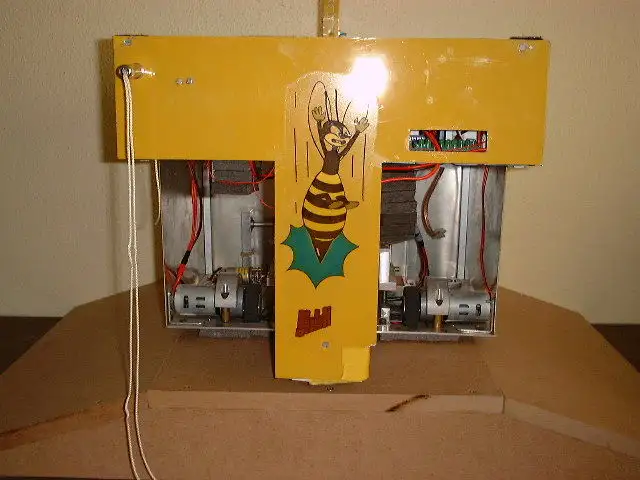
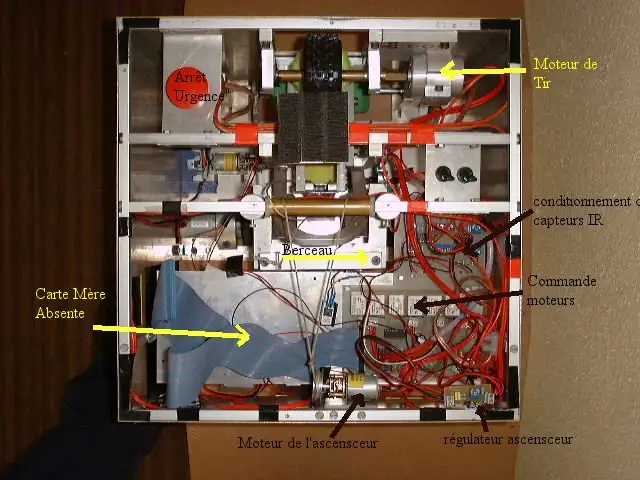
Vue arrière (cliquer pour élargir):
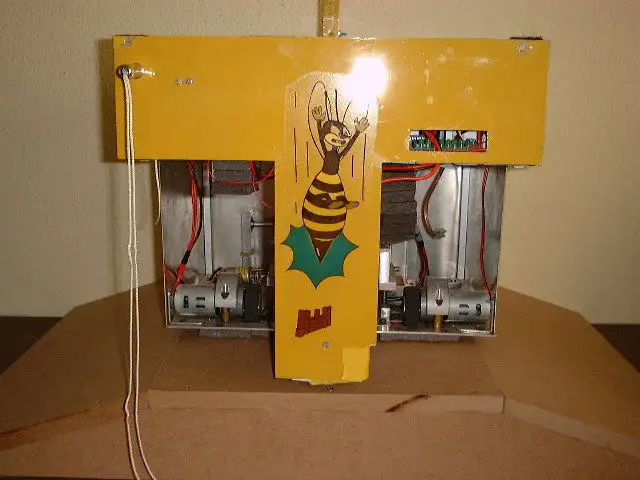
Ici les deux robots OBI1 et OBI2 ne sont pas en position encore. On aperçoit de part et d ‘autres les deux moteurs à courant continu fixés par des bagues en aluminium fabriqué par les agents techniques de l ‘ESSAIM (merci encore !).
Vue arrière (cliquer pour élargir):

Les deux robots OBI1 et OBI2 sont posés. En fait deux servomoteurs du commerce enroulent autour de leurs flasques une ficelle qui permet de descendre sur commande les deux robots.
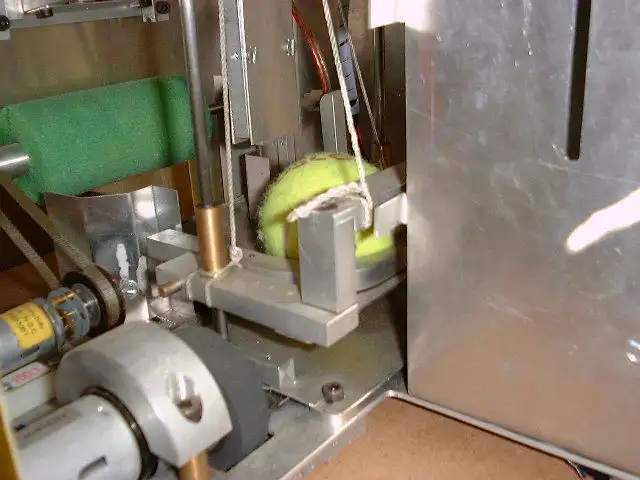
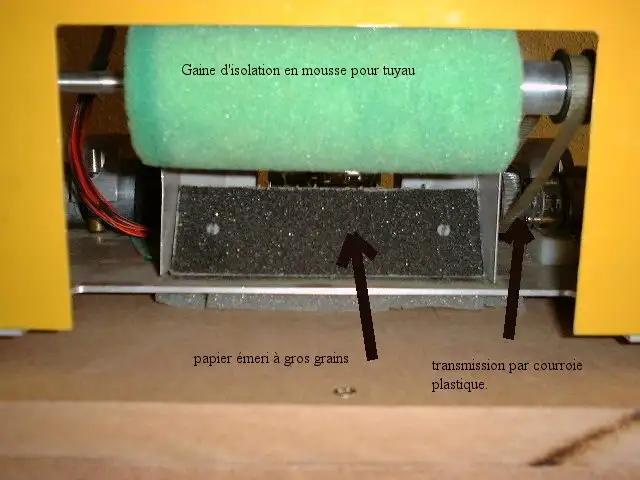
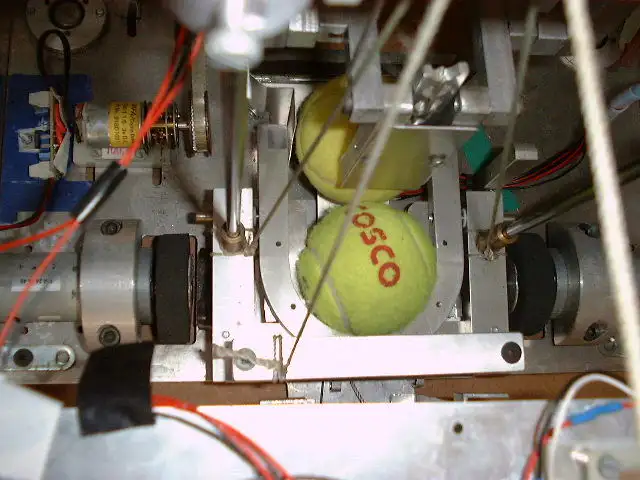
Zoomons un peu sur la face avant du robot :
Voici une vue plus précise du système d ‘aspiration de balle de tennis ainsi que du système de projection. Les vues sont assez explicites et se passent presque de commentaires.
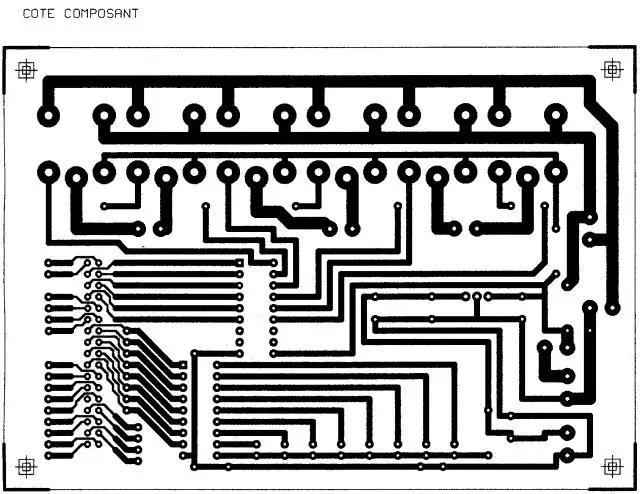
LA PROPULSION :
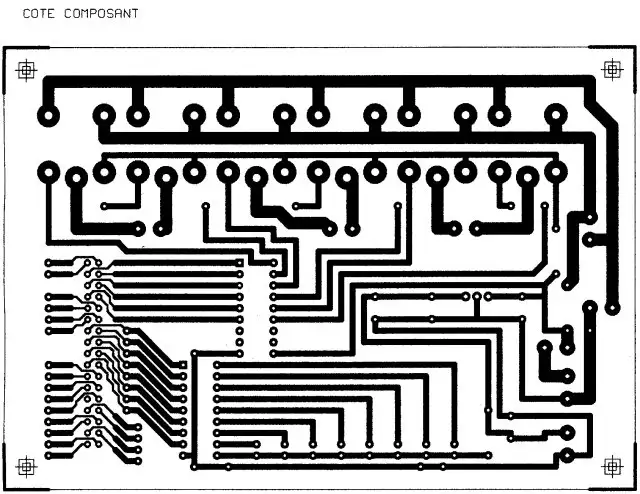
Cliquer ICI pour voir le PCB qui gère les deux moteurs principaux.
{kind=link}
La carte de commande des moteurs. Commande en tout ou rien par relais.
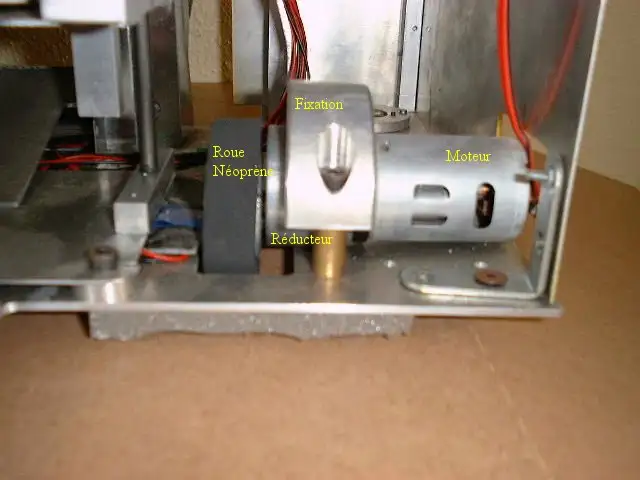
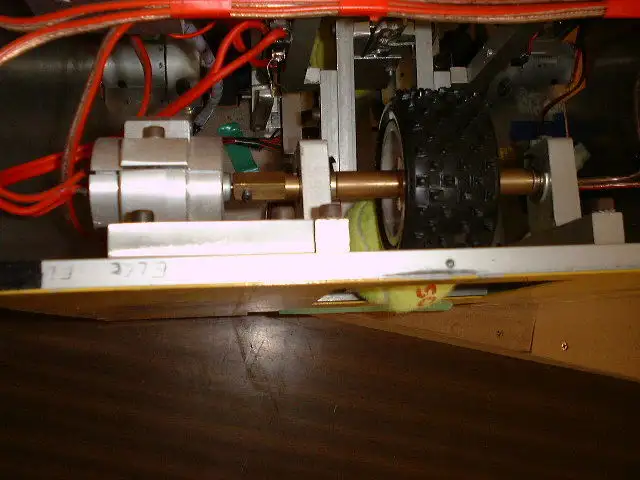
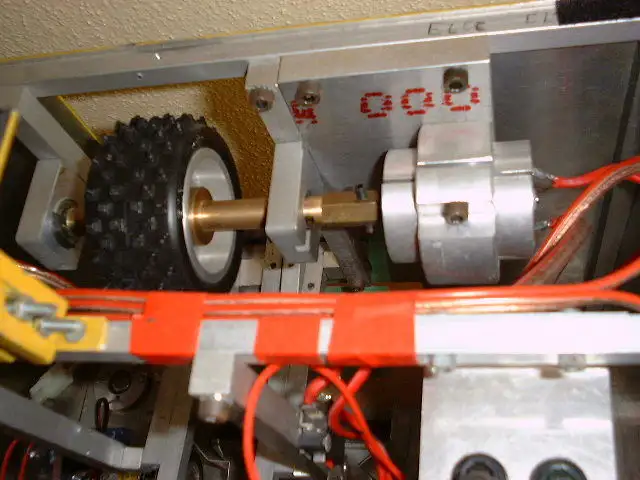
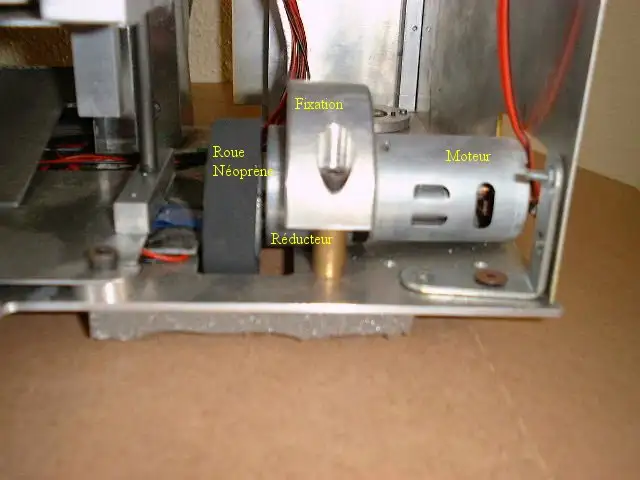
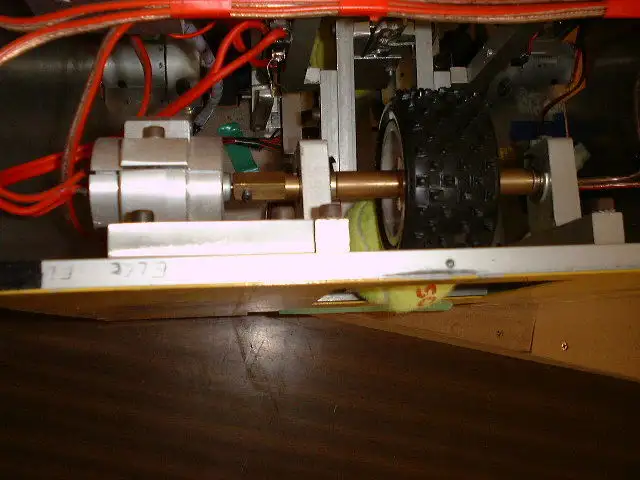
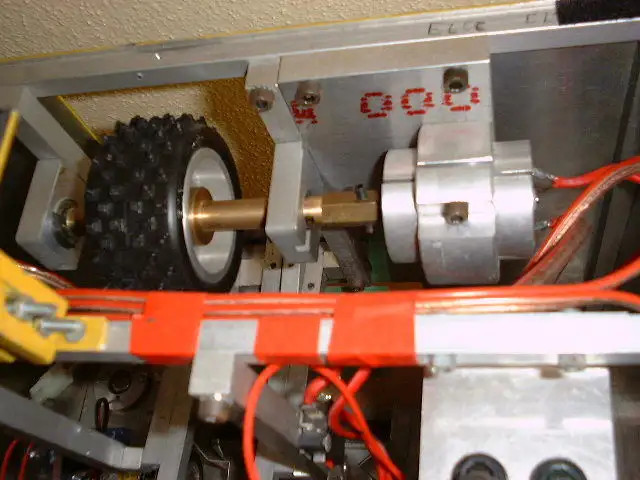
Moteur Conrad 12 Volts Réducteur + moyeu alu usiné par nos soins. Roue en Néoprène coupé Ã la bonne épaisseur.
Vu de dessus sur le même moteur mais coté gauche. La symétrie est parfaite et on peut mieux voir la fixation avec les 2 vis alènes. A coté on remarque le minuscule moteur du rouleau avec sa logique de commande (tout ou rien, en fait juste une réduction de la tension)..

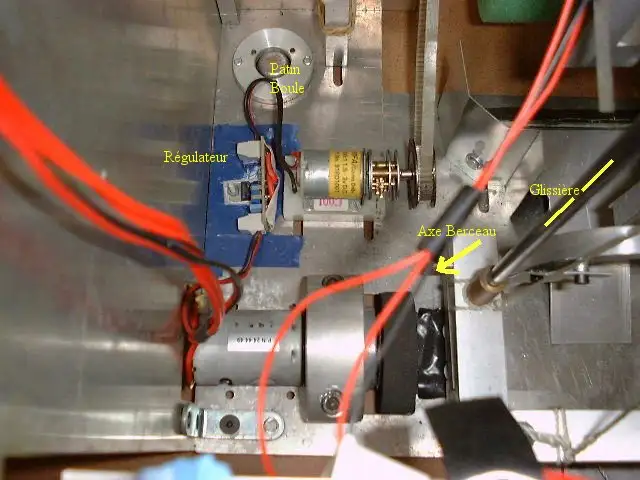
Pas de roues a l’arrière mais des boules… ne laisse aucune trace sur la piste. Nota : les PMI possèdent des patins en téflon pour des raisons évidentes de places.
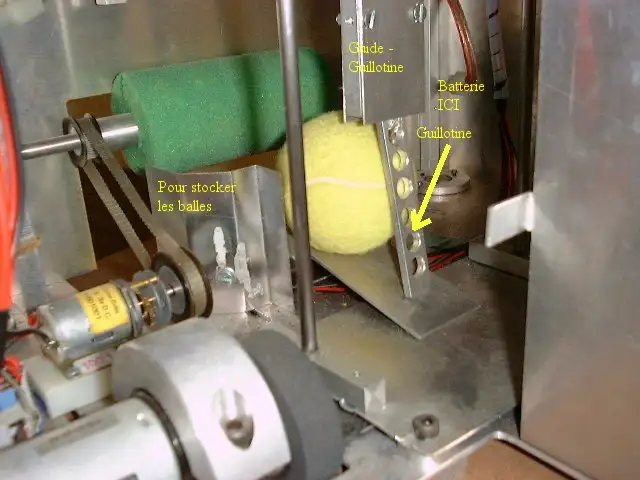
LE SYSTEME DE TIR :

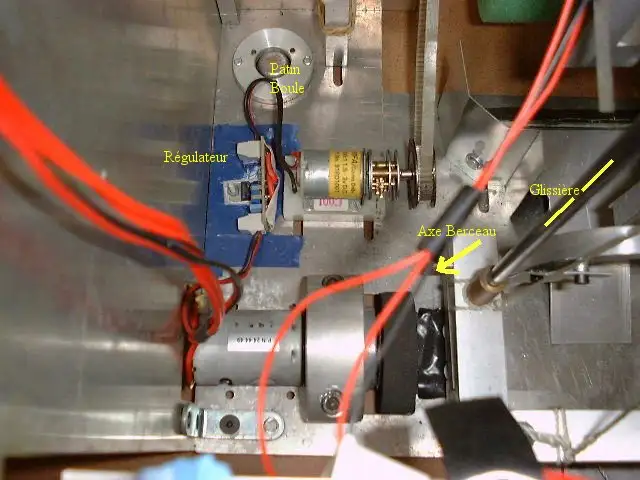
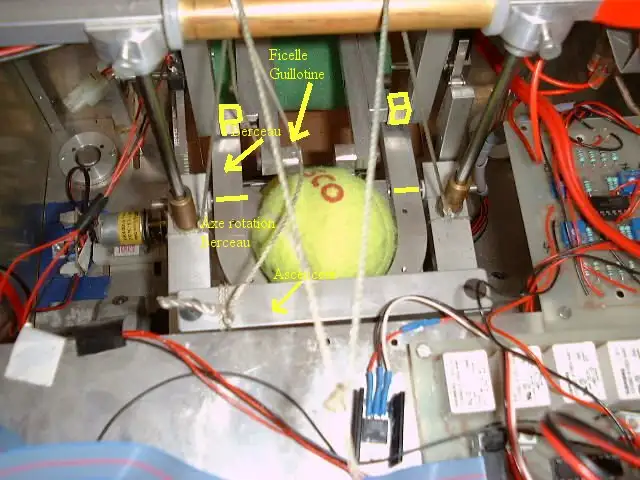
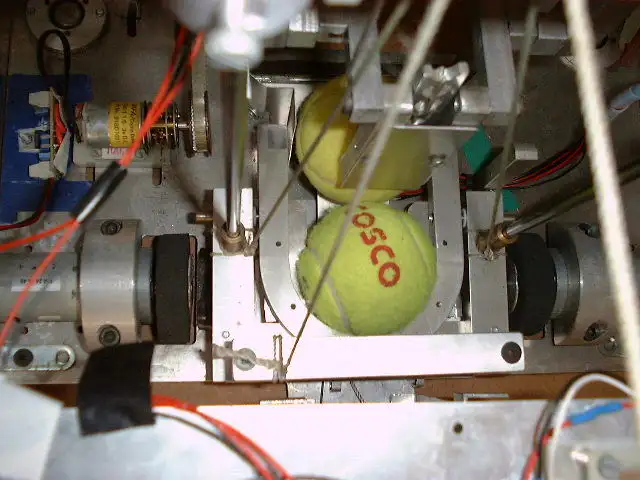
Balle en bas. La balle est à l’horizontal dans le berceau.
Idem mais vue de dessus. Noter les deux liaisons pivot glissant sur lequel coulisse verticalement le panier basculant.
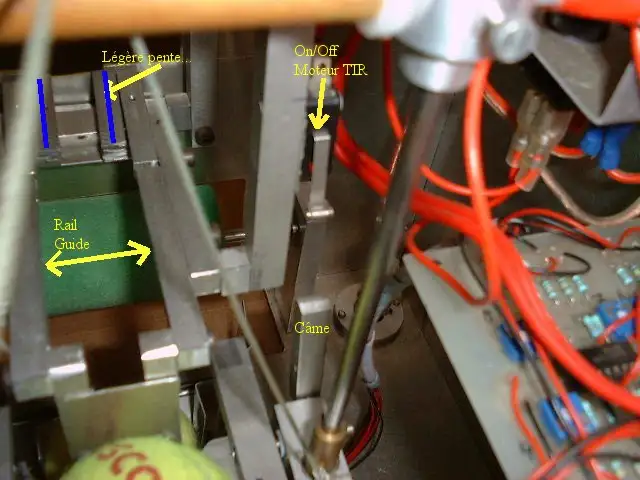
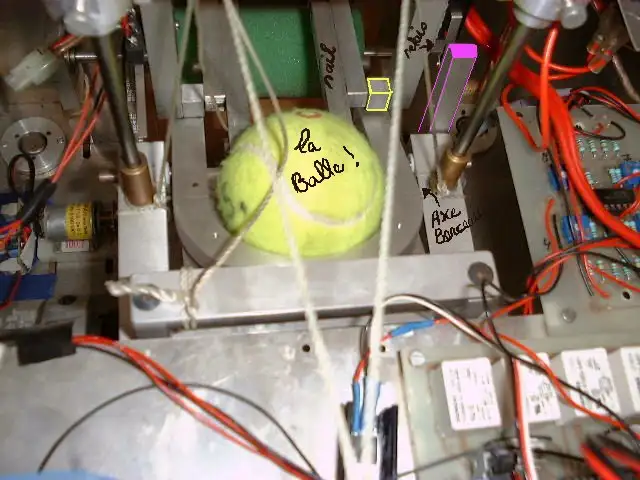
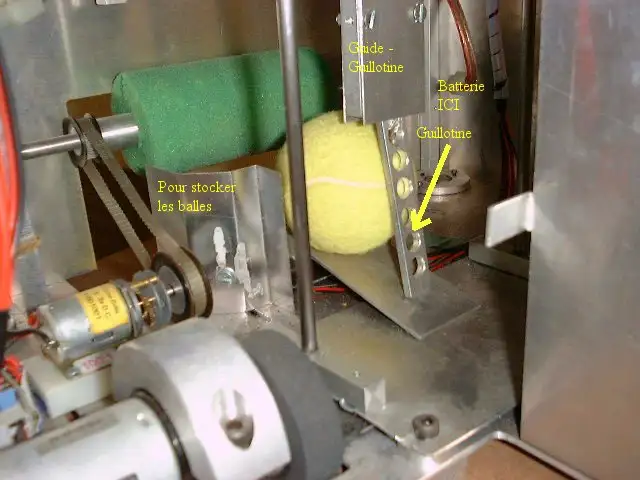
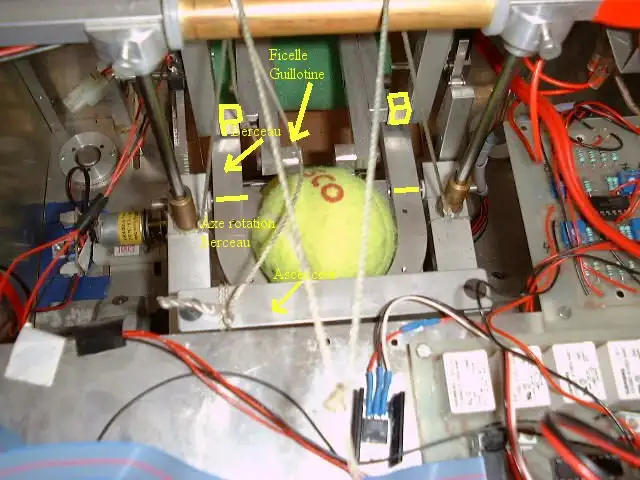
On tend la ficelle, le berceau monte avec la balle. On prend l’exemple d’une balle en attente. Noter la superbe astuce dans la case suivante.

Une guillotine ! Elle empêche le passage de la seconde balle tant que le berceau est en l’air (liaison avec une vulgaire ficelle).
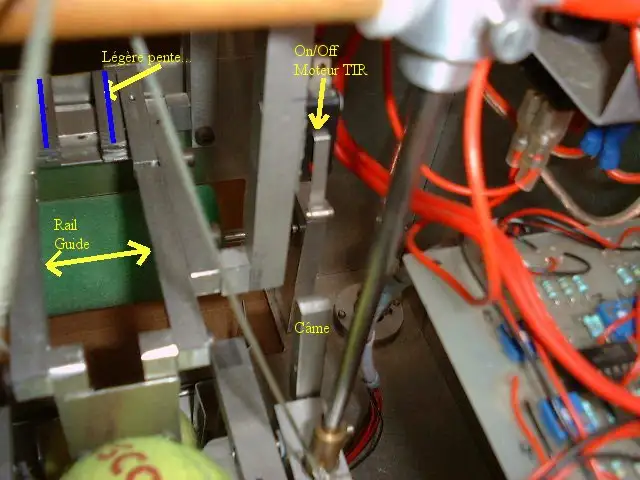
On note le rail horizontal vers le système de tir et le guide pour la guillotine au premier plan. La carte à coté, c’est le système de détection des lignes (IR en tout ou rien).
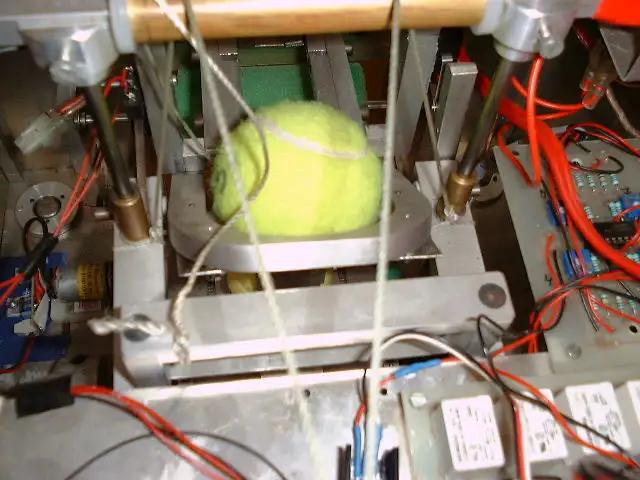
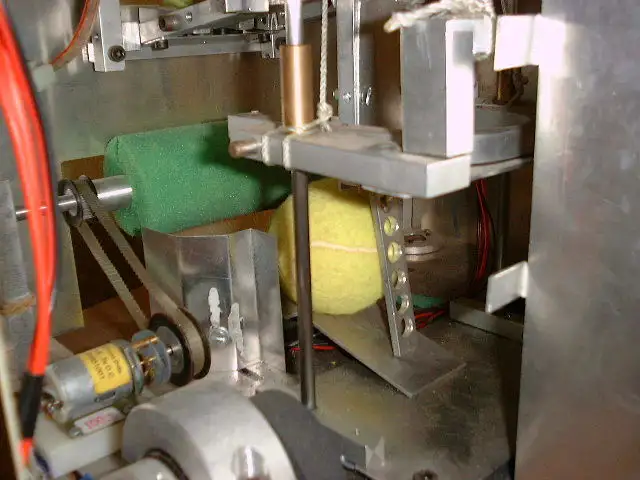
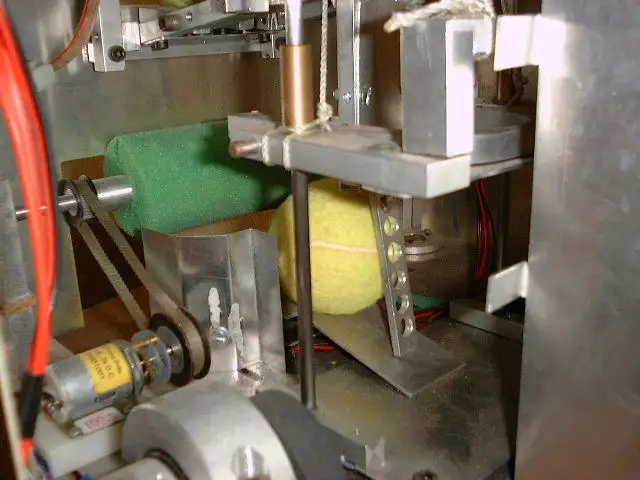
On est presque arrivé en haut. Le berceau peut coulisser autour d’un axe horizontal et si vous regarder bien le berceau est volontairement trop long (butée contre le bâti en jaune).
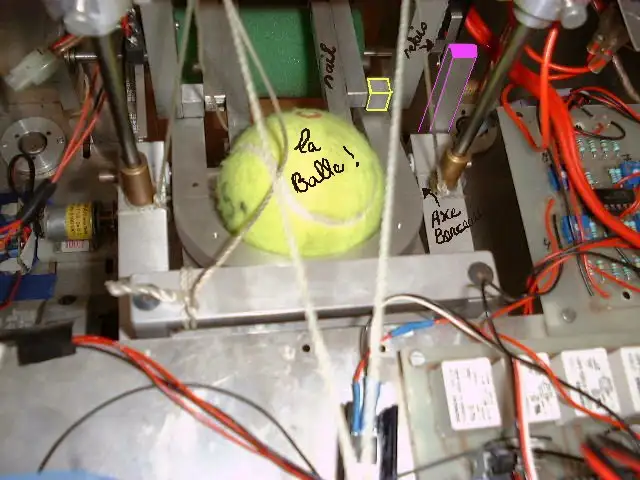
On continue donc à tirer dessus, un fin de course allume maintenant le moteur de tir avec une petite avance (c’est le rôle de la tige à droite en violet, que de réaliser cette temporisation).
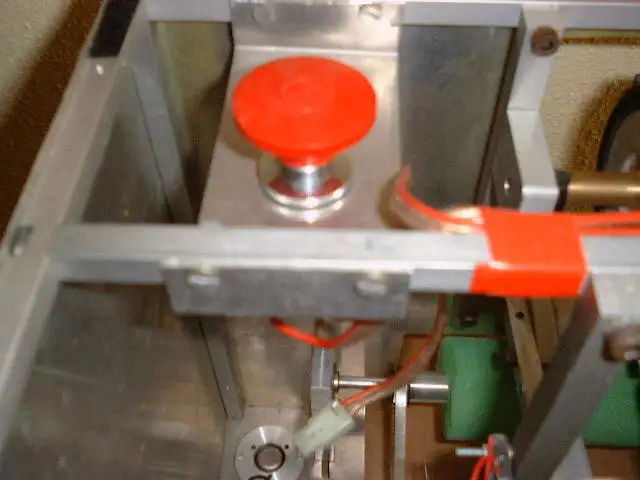
La gravité va faire le reste, la balle roule vers le système de tir…..

La balle est légèrement comprimée. En fait la roue de modélisme est creuse et souple, avec la vitesse de rotation élevée du moteur, elle se déforme et ses crampons empêche qu’une balle ne parte pas. Malheureusement, l’excentricité forme un balourd, qui fait vibrer tout le robot, et fait même un peu peur. Mais quelle Patate ! mieux que JPP

Attention, ne restez pas devant ! ça va faire BOUM
Vu de dessus de l’imposant moteur de tir, 9A en transitoire et une fixation qui ne favorise pas le refroidissement (voir photo), un fin de course de 3.6 A maximum ! (grille même pas rapidement)
Vu de coté du même dispositif…
Pendant ce temps… la deuxième balle est toujours coincé en bas par la guillotine (un bout de métal fixé avec une ficelle autour de la poulie constituée par le bâti).
L’ascenseur revient vide…

Et c’est reparti pour un tour si l’on peut dire.
Voici la première ébauche de notre système de tir, au cas ou ce ne serait pas encore clair. Ebauche du système de tir.
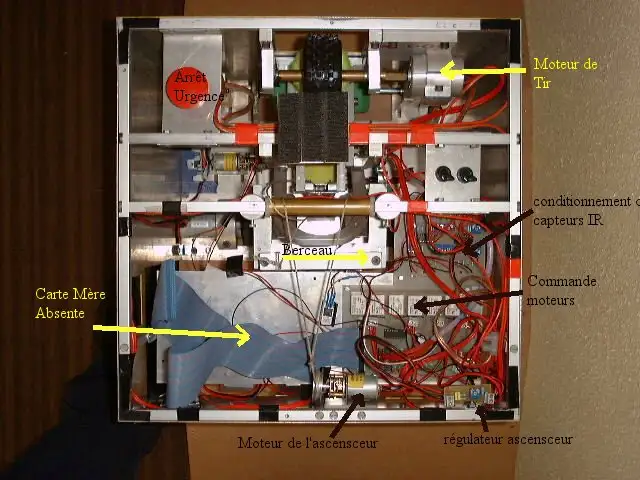
L ‘ELECTRONIQUE :
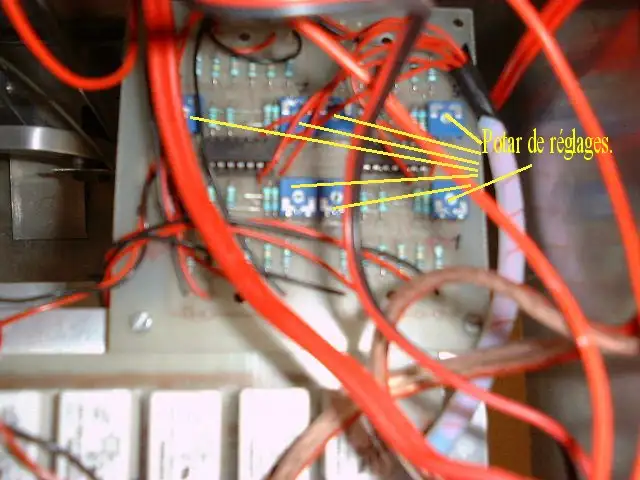
Vu de dessus du bric à brac.

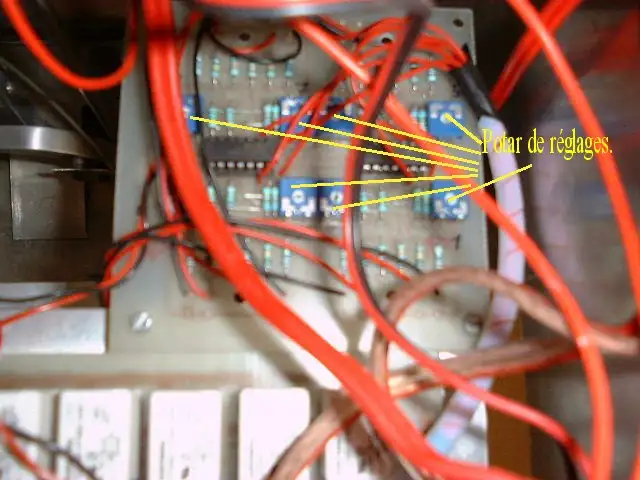
L’asservissement de suivi de ligne nécessite d’étalonner les leds IR avec des potentiomètres. Voici une aide au réglage pour chacun des 8 capteurs.
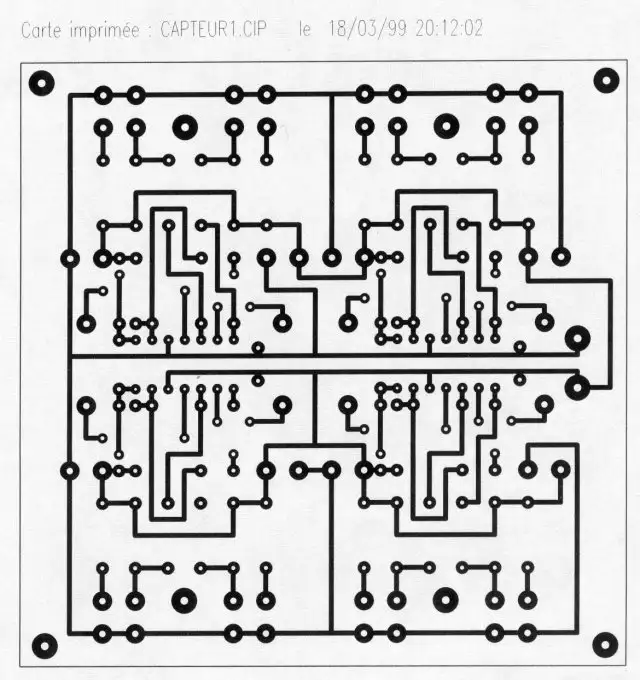
**LES CAPTEURS :**

Cliquer ICI pour voir le PCB qui gère 8 capteurs IR en tout ou rien.
LES MODULES :
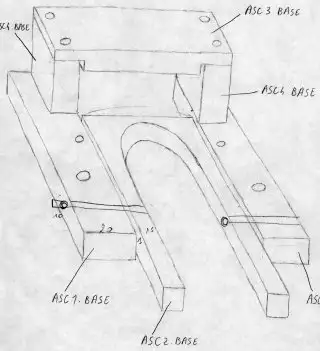
Il s’agit de petits modules à base de 80C535 programmés en assembleur qui possèdent chacun 2 servomoteurs auquel on a enlevé les fins de courses. Cliquer ICI
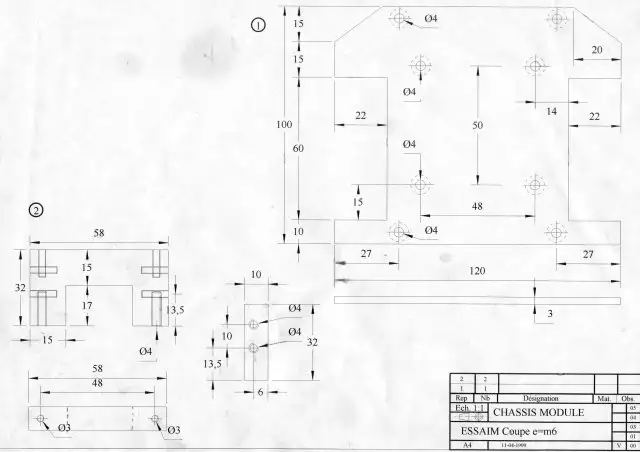
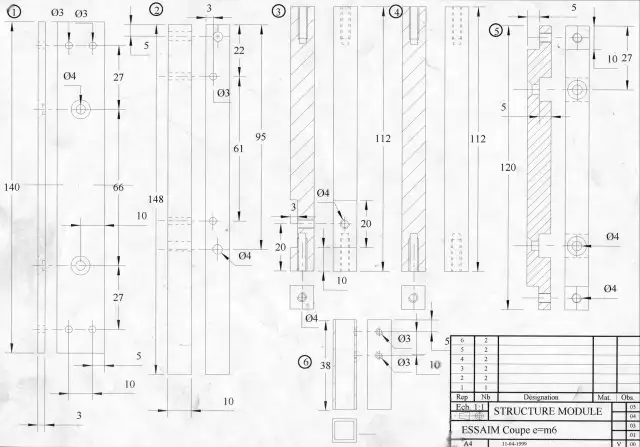
et LA
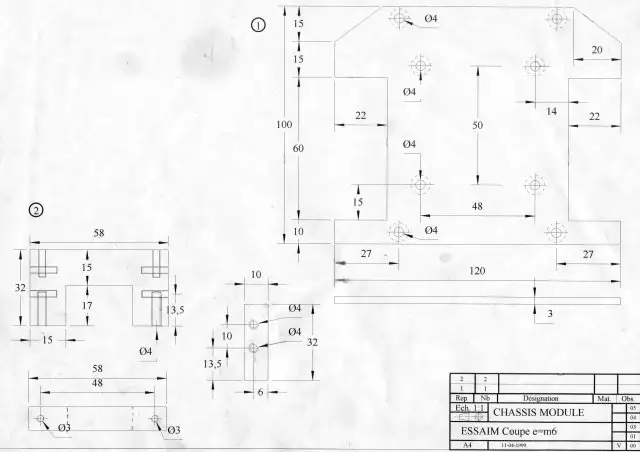
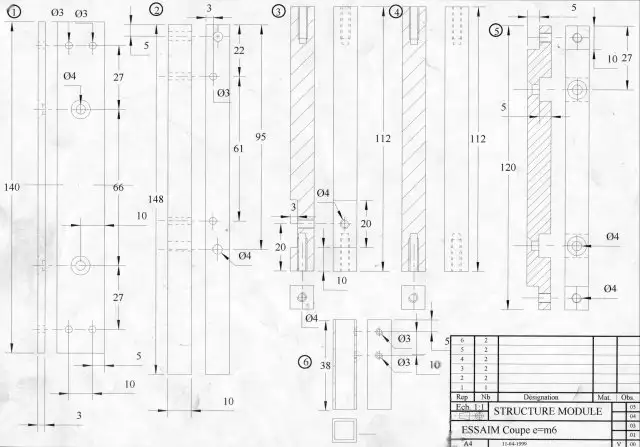
pour avoir les plans exacts des bâtis de ces modules. 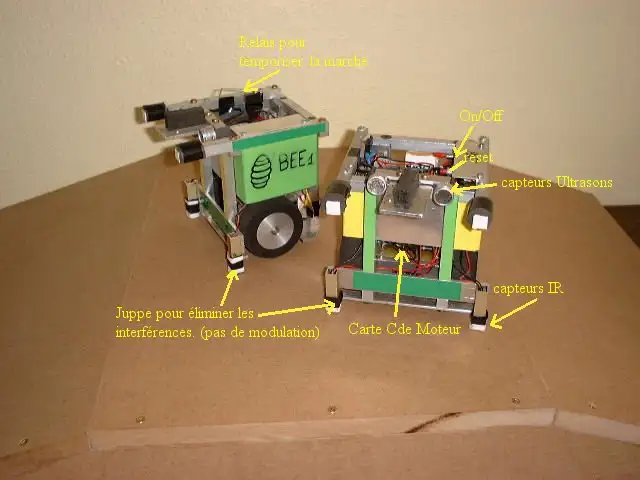
{kind=link}
{kind=link}
Reflexions techniques sur la coupe E=M6 1999
Je ne saurais être tenu responsable pour les erreurs d ‘attribution de technologies des différentes équipes citées ci-dessous. Ecrivez moi pour corriger toutes bévues. Les remarques n ’engagent que moi.
Ceci se veut être un document de synthèse sur toutes les technologies rencontrées lors de la coupe E=M6 et devrait pouvoir améliorer les performances de nos futurs robots. Il est le résultat de toutes mes nuits d ’errances sur le campus improvisé de E=M6, lorsque la nuit, le manque de sommeil et les hectolitres de Coca-Cola aidant les langues se déliaient plus facilement. Merci à tous ceux qui même à 3 heures du matin et après 30 heures de veille m ‘ont répondu. Bonne Lecture.
En grande majorité, on peut noter la grande complexité des robots participants à la coupe.
Les systèmes électroniques sont complexes et étagées, le cablage en majorité touffue (je dirai prototypesque), ce qui provoque des problèmes d ‘isolations et de destruction inopinée.
On peut dire que la majorité des pannes, même pour notre robot, provient du manque de rigueur dans le calcul des composants (fichu régulateur de tension) et du cablage réalisé à “la va vite” qui marche un premier temps mais qui se révèle désastreux à l ‘usage. Nous avons aussi mal construit le système de puissance avec des pistes trop petites, et nous n ‘avons pas non plus inséré des fusibles. Après ce mea culpa aussi grand qu ‘une poutrelle, passons aux brindilles dans les yeux des autres équipes
En ce qui concerne le développement et le contrôle :
Peu en fait utilisent des micro-contrôleurs hormis pour leur PMI pour des raisons évidentes de place. Notons que Supelec Rennes incorporait une solution originale à base de carte 68HCll maitres-esclaves (5 au total mais cela ne marchait pas), et que ville d ‘Avray, vu la vitesse d ’exécution et la relative constance dans le déplacement doit utiliser un automate industriel très rapide.
Sur cible 68hcl 1, j ‘ai remarqué Control Boy, une solution commerciale qui se révèle très facile à l ‘usage (copier coller de blocs) et des compilateurs dédiés sous DOS.
Beaucoup de langages procédurales (ou utilisés comme tel) Pascal, C etc
Beaucoup trop de robot nécessitait un poste portable pour démarrer (soit une liaison série, soit une connectique complète de PC), ce qui prouve que notre mode de gestion dans un fichier de démarrage est préférable, moins souple mais moins stressante et plus sur.
Des chips programmés en VHDL purement combinatoire pour les PMI (bonjours les équations ! ).
Une équipe utilisait une GAME BOY comme contrôleur avec une carte d ‘E/S, astucieux mais plus un symbole que un exemple à suivre (l ‘écran incorporé était utile et la programmation se faisait en C sur PC avec un cross assembler).
L ‘ENAC utilisait pour configurer ses PMI un soft développé par un Thésard pendant un an, il représentait la piste et les courbes du parcours tracé à la souris, aidait la configuration d ‘un exécutable. Impressionnant!
Beaucoup d ‘équipes ont aussi équipé leur robot de dissipateurs thermiques munis de ventilateurs, et utilisent pour le robot principal des solutions à base de carte mère PC (rack industriel ou carte Arcom).
En ce qui concerne les stratégies :
Au chapitre des bonnes idées, beaucoup de bar graphe lumineux qui après examen minutieux et maintes questions se révèle être un moyen astucieux de posséder plusieurs stratégies différentes avec une seule action télécommandée. Il suffit d ‘appuyer sur le bouton poussoir lorsque la bonne stratégie associée à la LED est allumée.
La télécommande est indispensable et clairement plusieurs matchs ont étés gagnés de justesse grace à ce périphérique. En effet beaucoup de robots ont des comportements bizarres non programmés et l ‘intervention humaine à permit dans bien des cas à sauver la partie (destruction de son propre chateau). Composés de simple émetteur IR ou de télécommande du commerce à 49 FF bricolé (voiture FM nda) que je ne recommande pas car a base de quartz normalisé 27,5 MfIz. La télécommande peut aussi bloquer l ‘autre robot, ce qui peut s ‘avérer efficace si le robot en face à une intelligence inversement proportionnelle à celle de l ‘opérateur, c ’est à dire idiot.
J ‘ai compté environ 20 équipes qui possédaient des télécommandes.
Les PMI qui longent les rives sont très astucieuses et souvent très rapides mais le contre est trop prévisible et ne doit donc pas être la seule stratégie ou mode de déplacement d ‘une PMI.
En ce qui concerne les capteurs
Aucune utilisation des ultrasons qui au dire des équipes sont désastreux lors des matchs, nous avons du aussi les désactiver pour plus de sà»reté et pour avoir un comportement moins aléatoire de notre PMI.
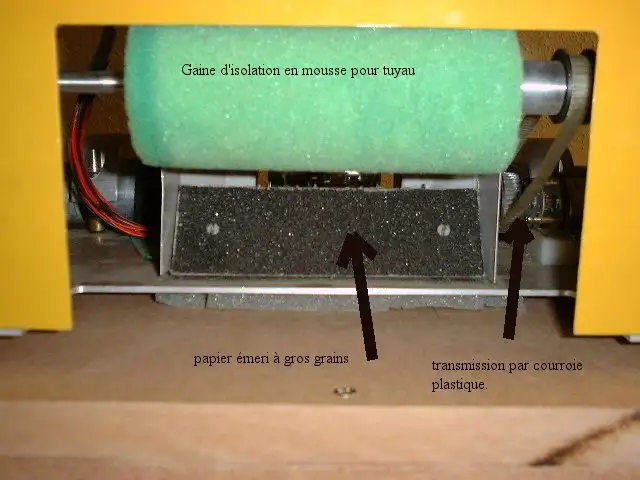
Très peu aussi ont utilisé les infrarouges, car d ’expérience le résultat est catastrophique et pour une raison très simple : il existe trop de perturbations lumineuses (lumières rasantes, torches IR des caméras, réflexions), La seule raison pour laquelle notre robot fonctionnait plutôt bien (honnis en 1/4 de finale), c ’est que nous avions eu l ‘idée d ‘isoler les capteurs pourtant bien en dessous du robot par de la gaine d ‘isolation de porte. Idem pour les capteurs de la PMI qui se sont vu adjoindre une jupe en tissus, car ils ne discriminaient plus le fossé, ni les lignes blanches. La solution existe et est très employée, beaucoup d ‘équipes l ‘utilisent :
Il s ‘agit de saturer la piste en lumières, typiquement par une LED rouge et de relever le niveau de tension ou seuil qui en résulte par une photo diode. J ‘ai vu de tel robot équipé de 5 Leds qui fonctionnaient très bien et qui possédaient même de tels circuits en CMS et une vitesse d ’exécution proche de Ville d ‘Avray. Au dire des équipes, la seule difficulté est de régler finement les points de convergences des diodes de mesure sur la piste.
On peut aussi insérer un filtre rouge pour diminuer l ‘influence de la lumière blanche et mieux discriminer le vert.
Notre robot n ‘intégrait que deux capteurs pour le suivi de ligne, alors que d ‘autres avec 5 capteurs élaboraient des tables de vérité, qui autorisaient un déplacement rapide et moins “crabesque”.
Les capteurs incrémentaux relatifs faisait la loi et certaines équipes annonà§aient plus de 10000 pas par tours interpolés (ENS Cachan) !, d ‘autre suite à des problèmes techniques ont bricolé en hate des codeurs composés d ‘un disque en plastique munis de boulons qui frappaient un capteur mécanique de fin de course (ESIAE) ! pour un résultat plutôt honorable (précision <3mm). Ces capteurs étaient en appuis sous le robot sur la piste ou plus généralement sur les axes des moteurs.
Une équipe a incorporé un gyroscope piézo-électrique ? (30OFF dans radiospares mais on murmure que 150OFF permet d ‘avoir un super capteur avec conditionnement) mais un manque de rigueur ? ou une mauvaise implémentation sur le robot ? provoquait une dérive inexpliquée de +- 10% (résultat plus qu ‘honorable car on m ‘a dit que l ‘on peut avoir 70 ‘/s d ’erreur sans filtre de kalmann).
L ‘ENAC avec son système de tir avec visé Laser n ‘a cessé de m ‘intriguer. La présence du point rouge sur une tour se terminait systématiquement avec la destruction de celle-ci. Info ou Intox ? Une grande couronne de photo transistor et d ‘émetteur IR (LED sombre) régulièrement espacé sur le robot complétait le système. La même équipe détectait la présence d ‘une balle dans leur système de tir par la rupture d ‘un faisceau laser. Supelec Rennes avait aussi essayé de détecter la réflexion sur deux tubes en inox (balise), mais sans succès, alors que dire de l ‘ENAC sur des bouts de bois ? Après coup, je dirai, vu la profusion de leds IR que ce robot ENAC essayait de cartographier le terrain ennemi et que le laser n ‘était que la représentation physique de la future cible et aidait à la mise au point. L ‘apparente puissance de calcul de ce robot et l ’entrain à coder des élèves (logiciel de simulation de trajectoire) va dans ce sens.
Les Balises :
Dans la mesure du possible les balises sur le robot adverses sont très utiles, tout du moins dans un jeu de tir. Ville dAvray, Isep suivait les déplacements du robot adverse et empêchait ainsi tout tir direct.
Principalement constitué de balises lumineuses très puissantes ou des infrarouges avec détection du maximum voire pour Torsac, un micro electret (plus un gadget). Les rocher Suchard de Eifel (Paris) ont fait aussi beaucoup d ’effet. Il est très décevant que si peu d ‘équipes utilisent des balises fixes (10) même si les résultats sont honorables sans.
Tout au plus, certaines équipes utilisent une balise derrière le chateau sans doute pour ne pas faire de bêtises lors des tirs et savoir ou tirer.
La Propulsion:
La principale faiblesse de notre robot et de beaucoup d ‘équipes réside dans le choix des moteurs. Radiospares à 400 FF pour les uns, 1500 francs pour les autres, beaucoup mais alors beaucoup plus pour pour Ville Avray (on murmurait 30 000 FF pour la propulsion + commande) !.
Les moteurs pas à pas sont très peu employés car trop lent sans circuit spécialisé et trop soumis aux perturbations (dixit les équipes), seules les PMI en possédaient car la vitesse n ’est pas trop importante, on recherche plutôt la précision.
Notre robot était clairement trop lent mais compensait son handicap par une grande précision dans le tir associé à une puissance accrue. Je persiste à dire que des moteurs sont un investissement et qu ‘il faut surtout capitaliser notre choix en achetant des moteurs de positionnement industriel.
La commande des moteurs :
Beaucoup utilisaient des circuits PID numériques électronique (Hewlett Packard hctIlOO, ou LM629) couplé avec des capteurs incrémentaux (Supelec Rennes, Orsay), des PWM ou des moteurs pas à pas. Je pense que notre commande en tout ou rien avec des relais, même si elle marche craint !
Les plus modestes utilisaient des moteurs pas à pas de récupération.
Les roues :
Roues sur mesure en alu rouge (ENS Cachan), roue de Skate Board ou de modélisme haut de gamme.
Beaucoup cherchait à minimiser les glissements synonymes de perte de pas sur les capteurs. J ‘ai remarqué que beaucoup utilisaient des roues en aluminium munies d ‘un caoutchouc rond en leur centre et avait dès lors des problèmes de poussières sur les roues des PMI qui glissaient.
Les systèmes de tirs :
Les systèmes mécaniques rivalisaient de complexité et d ‘astuces, pour pro«eter une balle de tennis, j ‘ai noté
Le bumper électromagnétique bobiné artisanalement et calibré pour que sous 25.7V et 40A (en transitoire), le tir arrive sur les tours (Orsay Paris 11), selon l ‘auteur du système, le tir reste reproductible indéfiniment tant que l ‘on respecte les conditions initiales.
Un système rotatif composé de cartouches qui contenaient des ressorts comprimés.
Un système composé de 4 fà»ts qui contiennent des élastiques, complété avec 1 ascenseur et 1 rouleau d ‘aspiration.
Le robot qui aspire sur l ‘avant mais tire sur le coté tout en avanà§ant.
Un système ingénieux de cames qui compriment un gros ressort (Roboticam) mais la présence de plusieurs chaà®nes de vélo et d ‘une grande quantité de pignon, ne permet qu ‘au école de mécanique de le mettre en oeuvre. Cela reste un chef d ‘oeuvre de fabrication.
Beaucoup essayait de copier le système de tir des cours de tennis : deux roues en rotation et la balle prise au milieu. Le résultat reste correct sans plus.
Les vérins pneumatiques ou des robots qui intégraient des sous-ensembles pneumatiques (au moins 8 sur 78).
Les catapultes qui n ‘avaient aucun succès.
Enfin, notre système, qui n ‘ayons pas peur de le dire à été salué unanimement par toutes les équipes en présence et les juges pour sa simplicité, sa robustesse et sa précision.
Conclusions :
Une constatation s ‘impose, certes décevante, beaucoup de robots ne marchaient qu ‘avec un parcours cablé ! et étaient complètement idiot. Beaucoup d ‘ambitions ont été ravalées et les prouesses techniques ont fait place pendant les nuits à des solutions de fortune qui MARCHENT. Il faut néanmoins persévérer !
Autre regret et de taille,beaucoup d ‘équipe marche sur un budget reduit, qui n ‘a AUCUNE commune mesure avec les grandes écoles dommage! car cette compétition n ‘a alors plus de sens! pourquoi ne pas imposer chaque annee les microcontroleurs, le nombre de capteurs etc???
Peu d ‘équipe capitalisent d ‘une année sur l ‘autre aussi.
Ce qui nous a permit de gagner et qui je pense est le secret de toute réussite (hormis les prouesses techniques de l ‘intouchable Ville dAvray, mais avec quelle budget, combien de profs) est de modifier la stratégie en fonction du robot que l ‘on rencontre au vu de ses capacités. Il faut donc posséder un robot très souple (donc techniquement au point, on revient toujours au même problème) et une bonne équipe d ’espionnage (caméra pendant les homologations et les matchs). Enfin, il ne faudra surtout pas dévoiler toutes ses cartes lors des homologations, et même surcharger le robot de faux capteurs (laser par ex). Ces méthodes risquent néanmoins de nuire à l ’esprit de E=M6, mais augmentent les chances de réussite.
{kind=link}